Examples
Here you might find more detailed applications of tspgrap.
[1]:
# Imports
import numpy as np
from scipy.spatial.distance import pdist, squareform
import matplotlib.pyplot as plt
from tspgrasp import (
Grasp, CheapestArc, SemiGreedyArc, CheapestInsertion, SemiGreedyInsertion,
LocalSearch, SimulatedAnnealing
)
[2]:
# Create distance matrix with random coordinates
np.random.seed(12)
X = np.random.random((300, 2))
D = squareform(pdist(X))
Constructive
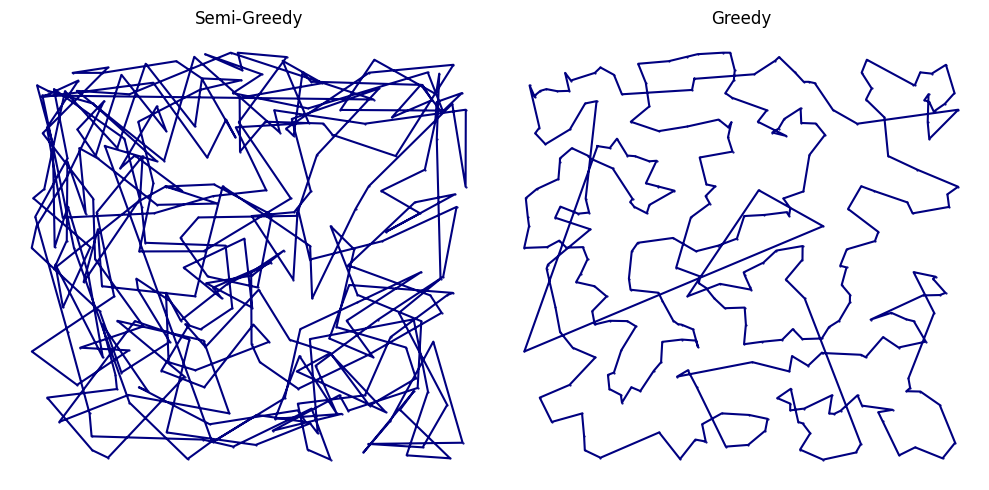
Cheapest Arc
[3]:
# Instantiate algorithms and solve problem
semi_greedy = SemiGreedyArc(alpha=0.8, seed=12)
greedy = CheapestArc(seed=12)
sol_sg = semi_greedy(D)
sol_greedy = greedy(D)
print(f"Cost Semi-Greedy {sol_sg.cost}")
print(f"Cost Greedy {sol_greedy.cost}")
Cost Semi-Greedy 46.364447780012846
Cost Greedy 16.06749370075501
[4]:
fig, ax = plt.subplots(1, 2, figsize=[10, 5], dpi=100)
tour = np.array(sol_sg.tour)
ax[0].scatter(X[tour, 0], X[tour, 1], color="navy", s=0.3)
ax[0].plot(X[tour, 0], X[tour, 1], color="navy")
ax[0].set_title("Semi-Greedy")
ax[0].axis('off')
tour = np.array(sol_greedy.tour)
ax[1].scatter(X[tour, 0], X[tour, 1], color="navy", s=0.3)
ax[1].plot(X[tour, 0], X[tour, 1], color="navy")
ax[1].set_title("Greedy")
ax[1].axis('off')
fig.tight_layout()
plt.show()
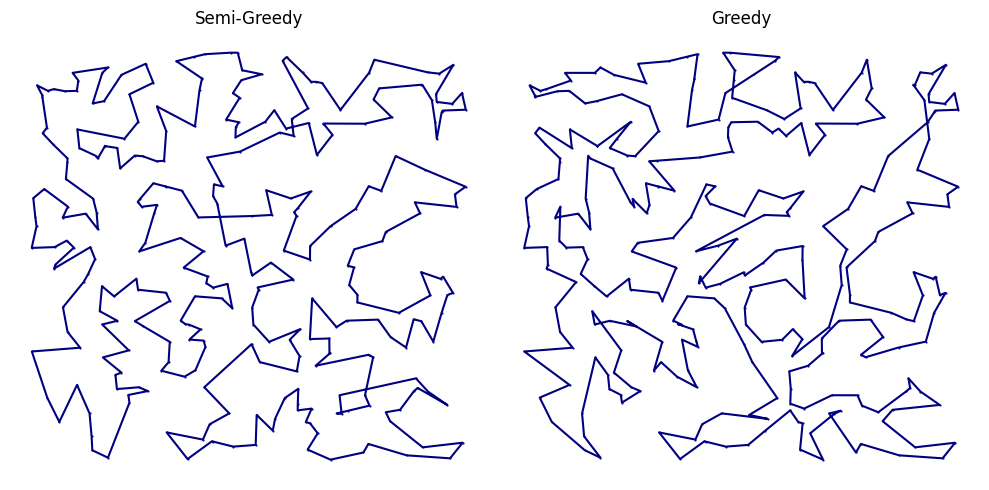
Cheapest Insertion
[5]:
# Instantiate algorithms and solve problem
semi_greedy = SemiGreedyInsertion(alpha=0.8, seed=12)
greedy = CheapestInsertion(seed=12)
sol_sg = semi_greedy(D)
sol_greedy = greedy(D)
print(f"Cost Semi-Greedy {sol_sg.cost}")
print(f"Cost Greedy {sol_greedy.cost}")
Cost Semi-Greedy 15.004827328670835
Cost Greedy 15.666113264739447
[6]:
fig, ax = plt.subplots(1, 2, figsize=[10, 5], dpi=100)
tour = np.array(sol_sg.tour)
ax[0].scatter(X[tour, 0], X[tour, 1], color="navy", s=0.3)
ax[0].plot(X[tour, 0], X[tour, 1], color="navy")
ax[0].set_title("Semi-Greedy")
ax[0].axis('off')
tour = np.array(sol_greedy.tour)
ax[1].scatter(X[tour, 0], X[tour, 1], color="navy", s=0.3)
ax[1].plot(X[tour, 0], X[tour, 1], color="navy")
ax[1].set_title("Greedy")
ax[1].axis('off')
fig.tight_layout()
plt.show()
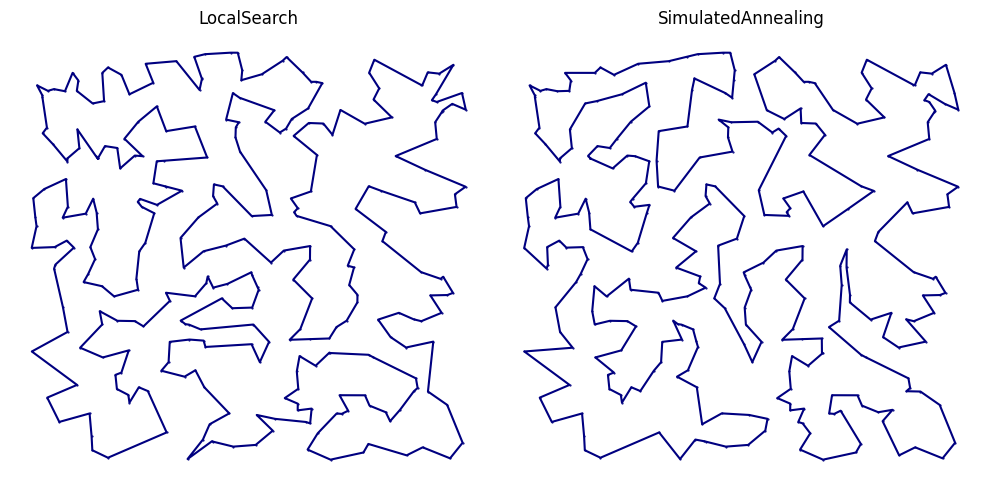
Local search
[7]:
# Instantiate algorithms and solve problem
ls = LocalSearch(seed=12)
sa = SimulatedAnnealing(seed=12, T_start=1e-2, T_final=1e-8, decay=0.99)
start = list(range(D.shape[0]))
sol_ls = ls(start, D)
sol_sa = sa(start, D)
print(f"Moves by VNS: {ls.n_moves}")
print(f"Moves by SA: {sa.n_moves}")
print(f"Cost VNS {sol_ls.cost}")
print(f"Cost Simulated Annealing {sol_sa.cost}")
Moves by VNS: 1644
Moves by SA: 1678
Cost VNS 13.837749954598257
Cost Simulated Annealing 13.790121626917749
[8]:
fig, ax = plt.subplots(1, 2, figsize=[10, 5], dpi=100)
tour = np.array(sol_ls.tour)
ax[0].scatter(X[tour, 0], X[tour, 1], color="navy", s=0.3)
ax[0].plot(X[tour, 0], X[tour, 1], color="navy")
ax[0].set_title("LocalSearch")
ax[0].axis('off')
tour = np.array(sol_sa.tour)
ax[1].scatter(X[tour, 0], X[tour, 1], color="navy", s=0.3)
ax[1].plot(X[tour, 0], X[tour, 1], color="navy")
ax[1].set_title("SimulatedAnnealing")
ax[1].axis('off')
fig.tight_layout()
plt.show()
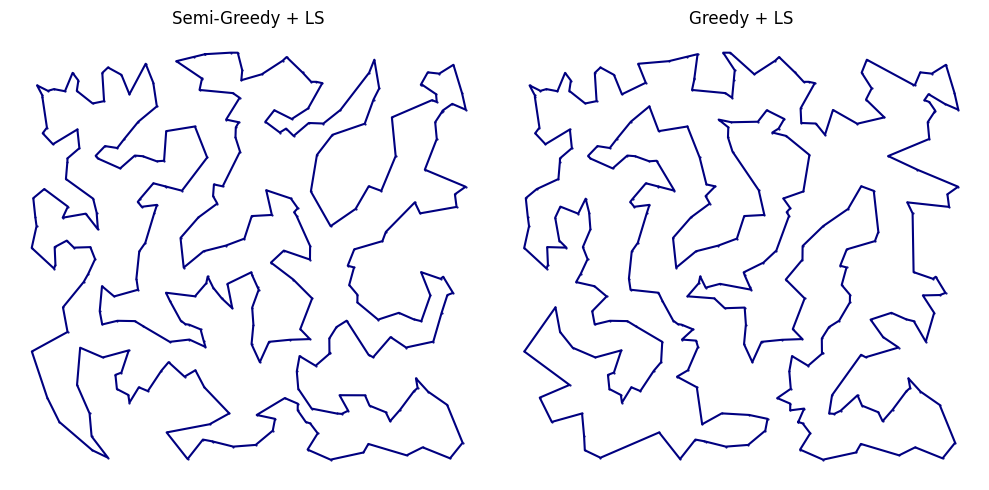
Grasp
Constructive
[9]:
# Instantiate algorithms and solve problem
ls = LocalSearch(seed=12)
semi_greedy = SemiGreedyArc(alpha=0.8, seed=12)
greedy = CheapestArc(seed=12)
grasp_greedy = Grasp(constructive=greedy, local_search=ls, seed=12)
grasp_sg = Grasp(constructive=semi_greedy, local_search=ls, seed=12)
sol_sg = grasp_sg(D, time_limit=60)
sol_greedy = grasp_greedy(D, time_limit=60)
print(f"Cost Grasp Semi-Greedy {sol_sg.cost}")
print(f"Cost Grasp Greedy {sol_greedy.cost}")
Cost Grasp Semi-Greedy 13.332905699199468
Cost Grasp Greedy 13.1759349953916
[10]:
fig, ax = plt.subplots(1, 2, figsize=[10, 5], dpi=100)
tour = np.array(sol_sg.tour)
ax[0].scatter(X[tour, 0], X[tour, 1], color="navy", s=0.3)
ax[0].plot(X[tour, 0], X[tour, 1], color="navy")
ax[0].set_title("Semi-Greedy + LS")
ax[0].axis('off')
tour = np.array(sol_greedy.tour)
ax[1].scatter(X[tour, 0], X[tour, 1], color="navy", s=0.3)
ax[1].plot(X[tour, 0], X[tour, 1], color="navy")
ax[1].set_title("Greedy + LS")
ax[1].axis('off')
fig.tight_layout()
plt.show()
Local Search
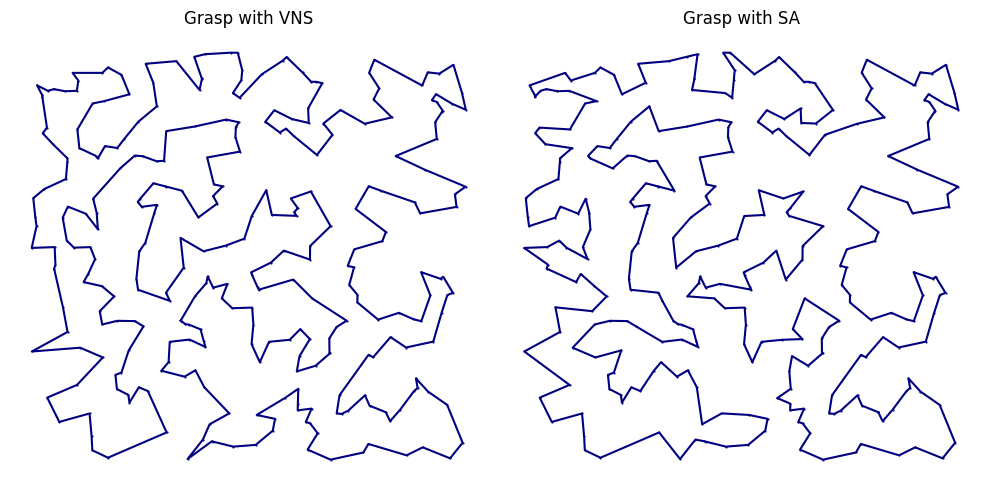
Notice Simulated Annealing is substantially slower than simple VNS to compute a single move even though using exp approximations with interpolation. Using the same time limit, simple VNS can find more solutions.
[11]:
# Instantiate algorithms and solve problem
ls = LocalSearch(seed=12)
sa = SimulatedAnnealing(seed=12, T_start=1e-2, T_final=1e-8, decay=0.99)
greedy = CheapestArc(seed=12)
grasp = Grasp(constructive=greedy, local_search=ls, seed=12)
grasp_sa = Grasp(constructive=greedy, local_search=sa, seed=12)
sol_vns = grasp(D, time_limit=60)
sol_sa = grasp_sa(D, time_limit=60)
print(f"Iterations with simple VNS {len(grasp.costs)}")
print(f"Iterations with SA {len(grasp_sa.costs)}")
print(f"Cost Grasp with VNS {sol_vns.cost}")
print(f"Cost Grasp with SA {sol_sa.cost}")
Iterations with simple VNS 1183
Iterations with SA 72
Cost Grasp with VNS 13.196022257611112
Cost Grasp with SA 13.239492141572477
[12]:
fig, ax = plt.subplots(1, 2, figsize=[10, 5], dpi=100)
tour = np.array(sol_vns.tour)
ax[0].scatter(X[tour, 0], X[tour, 1], color="navy", s=0.3)
ax[0].plot(X[tour, 0], X[tour, 1], color="navy")
ax[0].set_title("Grasp with VNS")
ax[0].axis('off')
tour = np.array(sol_sa.tour)
ax[1].scatter(X[tour, 0], X[tour, 1], color="navy", s=0.3)
ax[1].plot(X[tour, 0], X[tour, 1], color="navy")
ax[1].set_title("Grasp with SA")
ax[1].axis('off')
fig.tight_layout()
plt.show()
[ ]: